
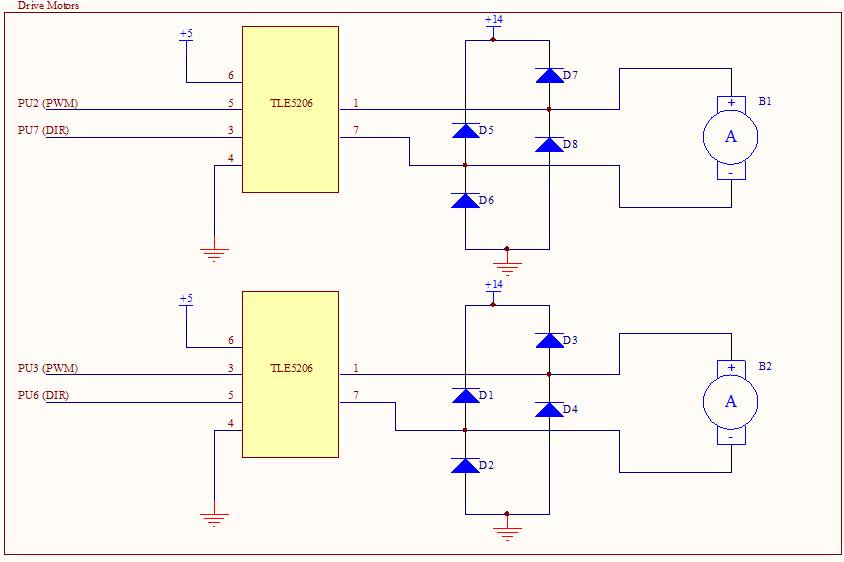
Drive: Electrical Design
For the drive circuits, we use two TLE-5206Bd Motor Driver Boards with the following anti-phase lock configuration.
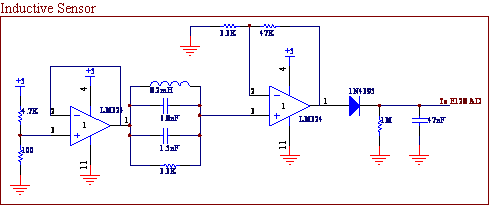
To drive straight, we used four inductive sensors (two in the front and two in the back) to sense a wire carrying a 100mA, 20kHz AC Current. These sensors would send an analog signal to the microcontroller, which was proportional to the distance from the wire to the inductors, giving us the ability to quickly react to small changes.
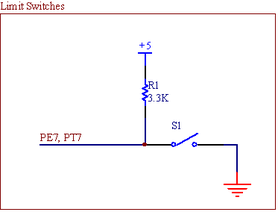
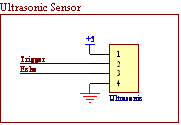
Finally, we used an ultrasonic sensor to slow down the Sir Robot as it approached the wall and a limit switch to stop the motors when Sir Robot reached the wall.
|
|
