Home
About
Team Members
Project Description
Our Strategy
Bill of Materials
Gems of Wisdom
Software
Pin Layout
State Charts
>
Master State Machine
Game State Machine
JSR
Joust State Chart
Round2Drive State Chart
Recess2 State Chart
Round3Drive State Chart
SimpleDriveToA State Chart
SimpleDriveToB State Chart
Pseudo Code
>
MasterSM
GameSM
JoustSM
SimpleDriveToASM
SimpleDriveToBSM
Round2DriveSM
Round3DriveSM
Recess2SM
JSR
Code Listing
>
MasterSM
GameSM
Round State Machines
>
JoustSM
SimpleDriveToASM
SimpleDriveToBSM
Round2DriveSM
Recess2SM
Round3DriveSM
JSR Service
Event Checkers
Component Controls
>
Digital Control
Drive Motors
Launcher Control
Reload Control
Servo Control
Ultrasonic Control
Headers
>
ES_Configure
Pins
Commands
Drive
Electrical Design
Mechanical Design
Jousting
Electrical Design
Mechanical Design
Shooting
Electrical Design
Mechanical Design
Other Stuff
Robot Drawings and Dimensions
Power
JSR
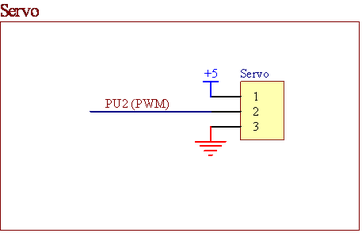
Jousting: Electrical Design
The jousting electrical design consisted of two servos: the first one retracts the lance for 1 second every 4 seconds, while the second one sweeps the lance back and forth.