Drive: Mechanical Design
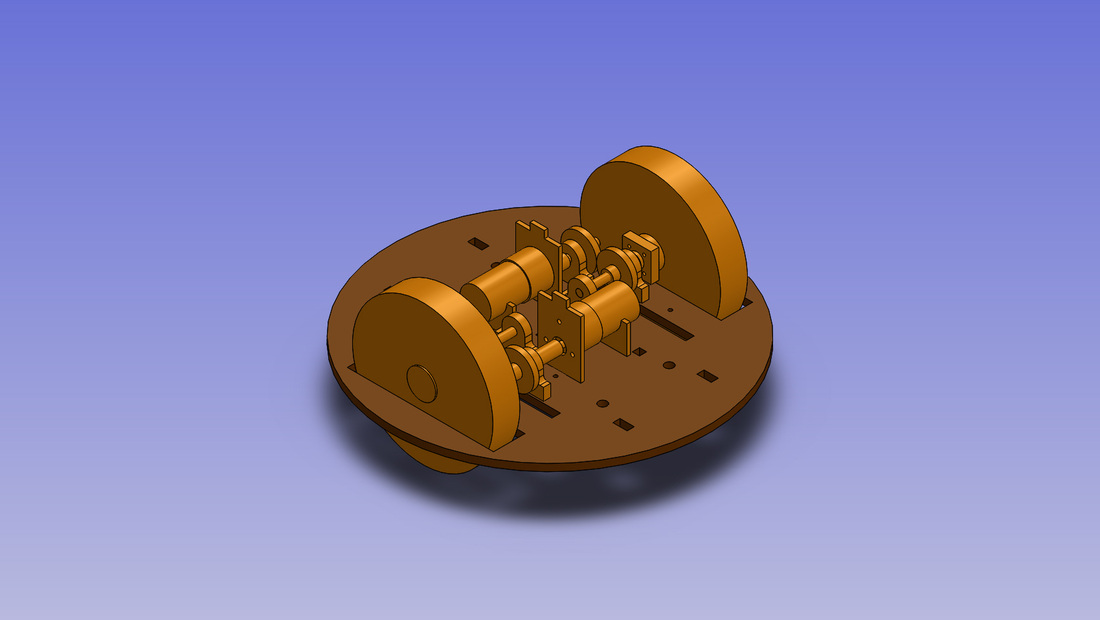
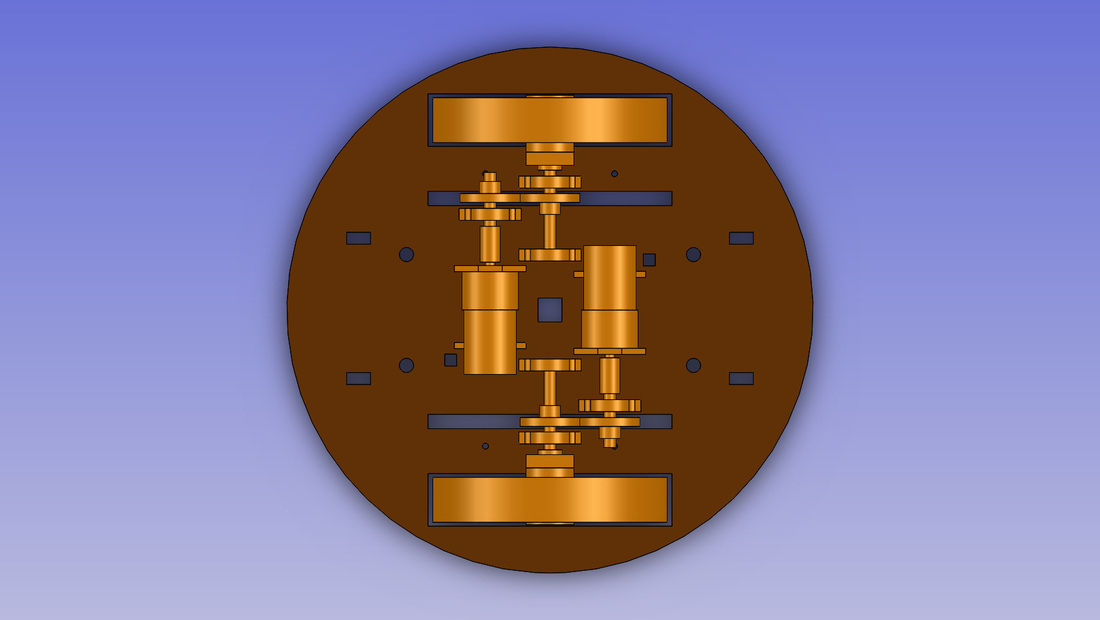
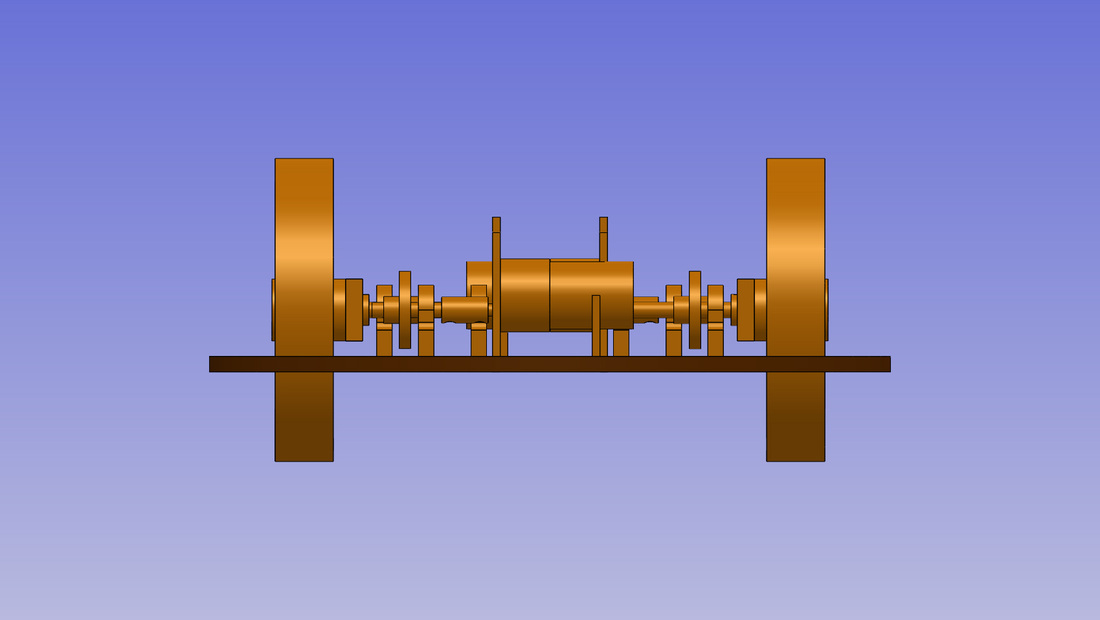
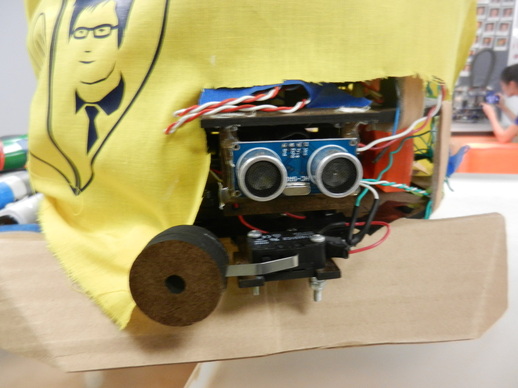
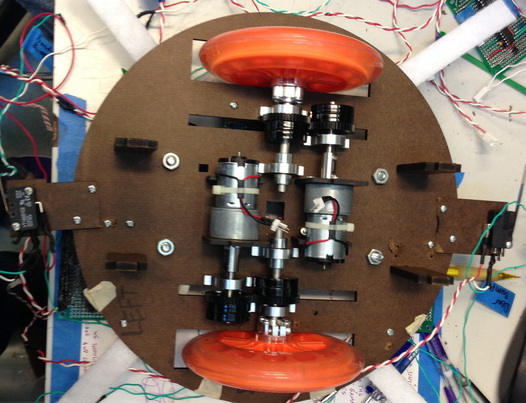
The motors are mounted to a 1:1 gear ratio drivetrain using pillow block bearings, d-shafts, and shaft collars. Five inch wheels were used to maximized the output speed of the robot.
Inductive sensor pairs are mounted on the front and back of the robot under the drivetrain plate. These sensors provide an analog signal to the microcontroller proportional to the distance to the magnetic wire on the ground - this allows drive in a straight line using PD control.
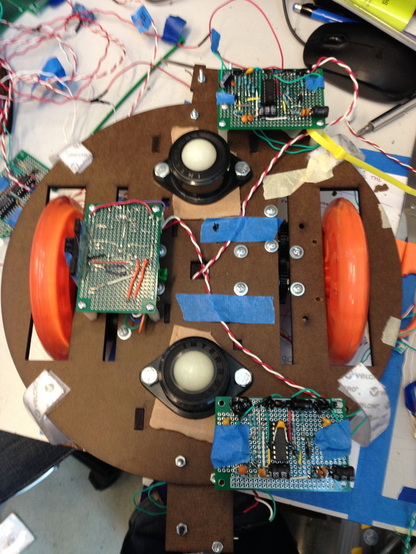
The robot can sense the distance to the home walls using ultrasonic sensors and stops completely within the home regions when the limit switches mounted on the front and back are depressed.